Hugmon: Exploration of Affective Movements for Hug Interaction using Tensegrity Robot
-
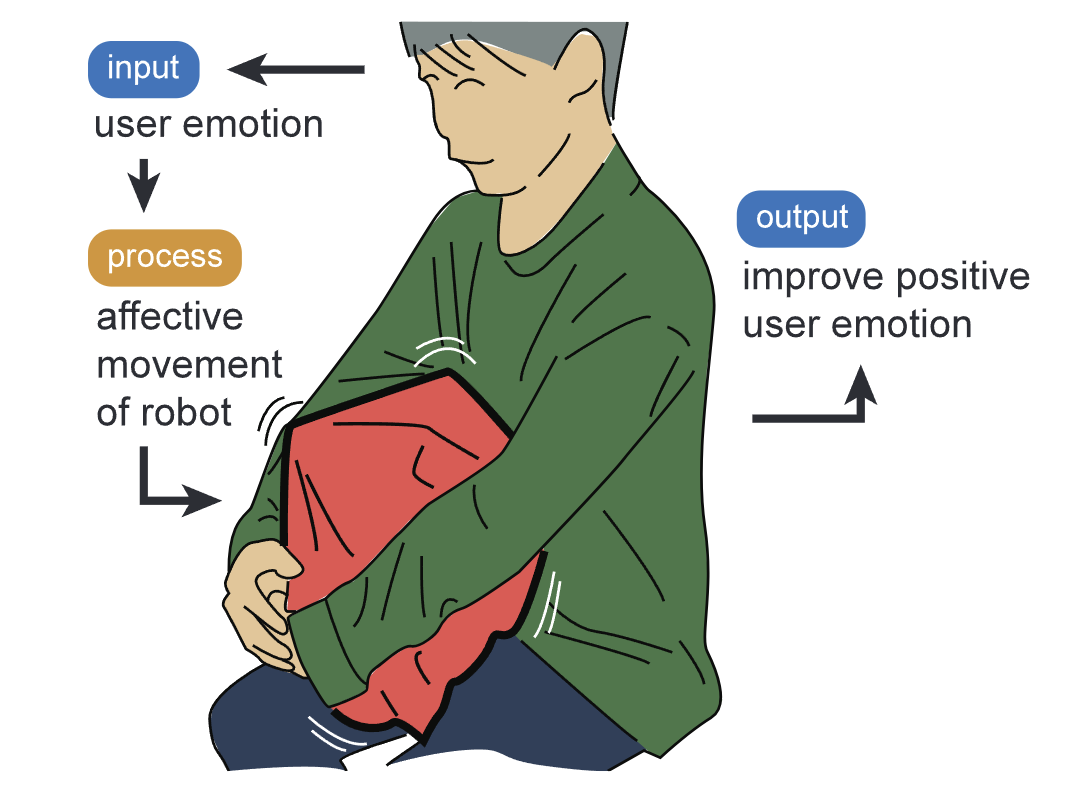
We proposed the robot expressing emotions through movement.
Since ancient times, a hug has been one of the most basic ways to express emotions and has played an important role in building relationships between people. On the other hand, social robots that are designed to provide mental health care to patients have been attracting great attention, and hugging between humans and robots is becoming more and more popular. In this study, we propose a huggable robot that allows intimate interactions between humans and robots. Our robot is based on a tensegrity structure, which is composed of rigid elements connected by springs, and the structure allows the robot to flexibly respond to external force from a hugging interaction, and express various emotions through its movements. In addition, we conducted user experiments and explored an interaction design for the affective movement of the proposed robot. Through the experiments, we confirm that a robot with a tensegrity structure can be used for a hug interaction and it has a large possibility for emotional interaction.
-
投稿先
ACM/IEEE HRI
-
メンバー
Naoya Yoshimura, Yushi Sato, Yuta Kageyama, Jun Murao, Satoshi Yagi, Parinya Punpongsanon (Osaka University)